Softmax, cross-entropy, regularization
CSI 4106 - Fall 2025
Marcel Turcotte
Version: Oct 28, 2025 17:11
Preamble
Message of the Day

Learning objectives
- Explain the role of softmax and cross-entropy loss in measuring the dissimilarity between predicted and true probability distributions.
- Explore methods like L1, L2 regularization, and dropout to enhance neural networks’ generalization capabilities.
Output Layers
Output Layer: Regression Task
- # of output neurons:
- 1 per dimension
- Output layer activation function:
- None, ReLU/softplus, if positive, sigmoid/tanh, if bounded
- Loss function:
Output Layer: Multi-Label
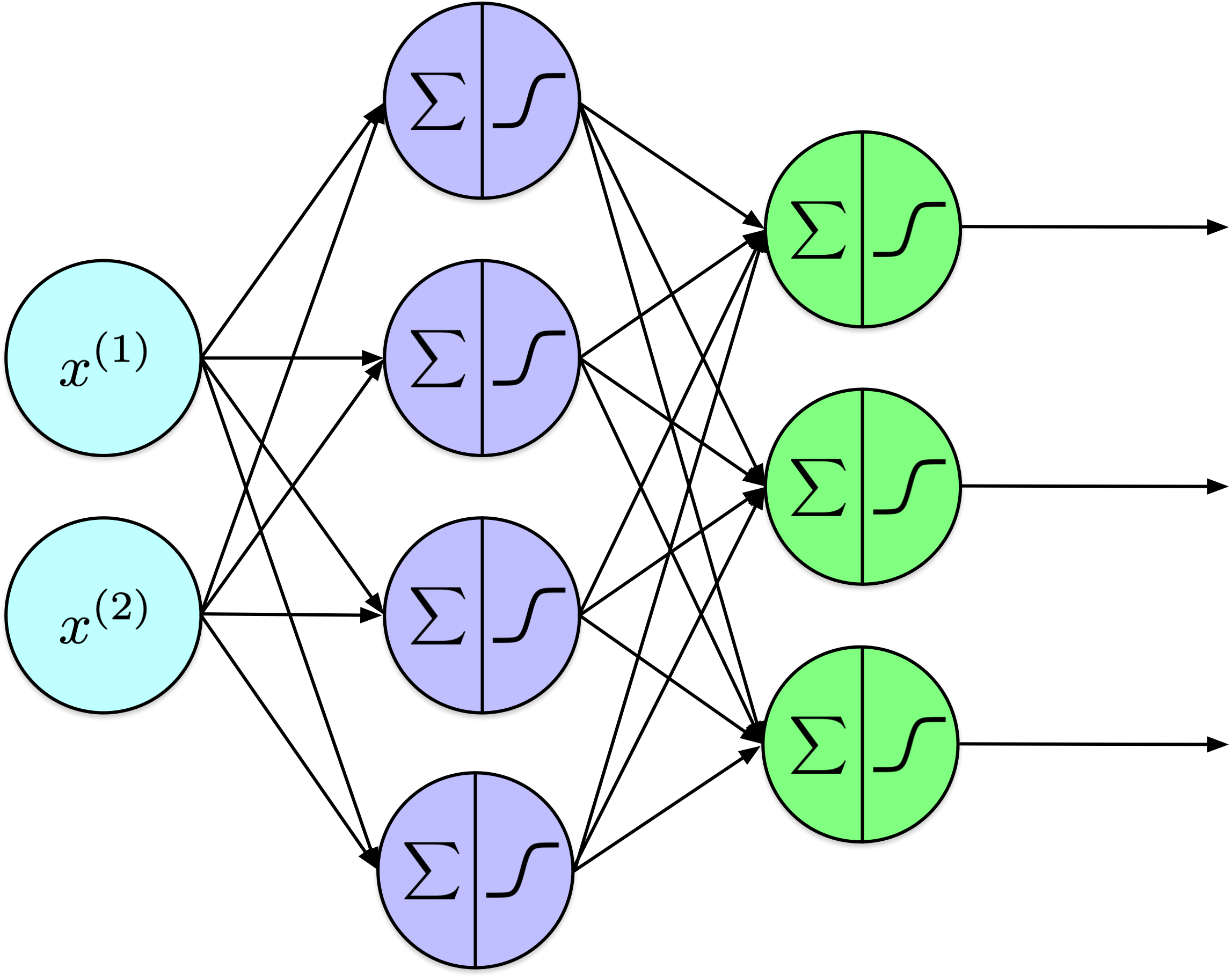
Output Layer: Classification Task
- # of output neurons:
- 1 if binary, 1 per class, if multi-label or multiclass.
- Output layer activation function:
- sigmoid, if binary or multi-label, softmax if multi-class.
- Loss function:
- cross-entropy
Softmax
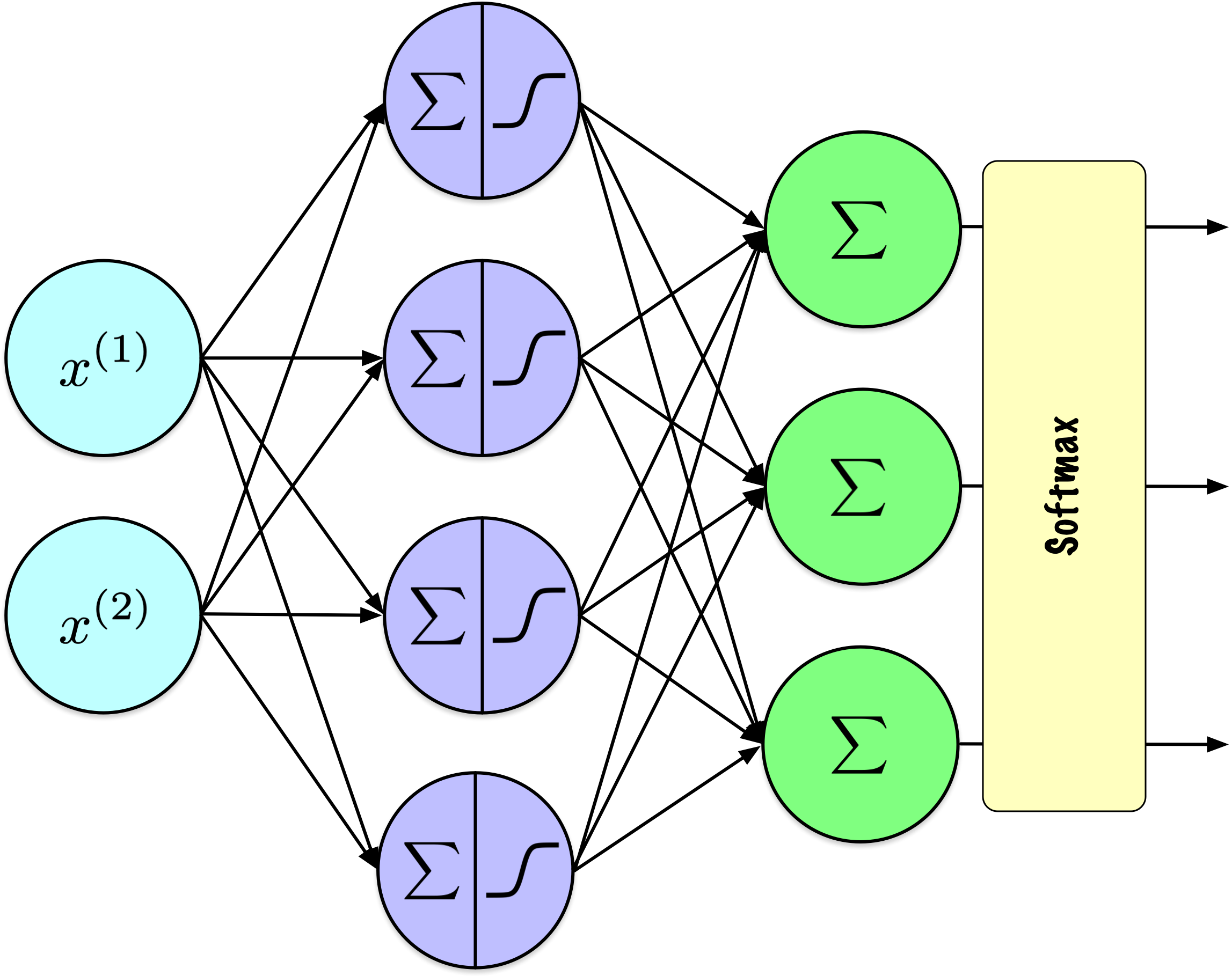
Softmax
The softmax function is an activation function used in multi-class classification problems to convert a vector of raw scores into probabilities that sum to 1.
Given a vector \(\mathbf{z} = [z_1, z_2, \ldots, z_n]\):
\[ \sigma(\mathbf{z})_i = \frac{e^{z_i}}{\sum_{j=1}^{n} e^{z_j}} \]
where \(\sigma(\mathbf{z})_i\) is the probability of the \(i\)-th class, and \(n\) is the number of classes.
Softmax
| \(z_1\) | \(z_2\) | \(z_3\) | \(\sigma(z_1)\) | \(\sigma(z_2)\) | \(\sigma(z_3)\) | \(\sum\) |
|---|---|---|---|---|---|---|
| 1.47 | -0.39 | 0.22 | 0.69 | 0.11 | 0.20 | 1.00 |
| 5.00 | 6.00 | 4.00 | 0.24 | 0.67 | 0.09 | 1.00 |
| 0.90 | 0.80 | 1.10 | 0.32 | 0.29 | 0.39 | 1.00 |
| -2.00 | 2.00 | -3.00 | 0.02 | 0.98 | 0.01 | 1.00 |
Softmax
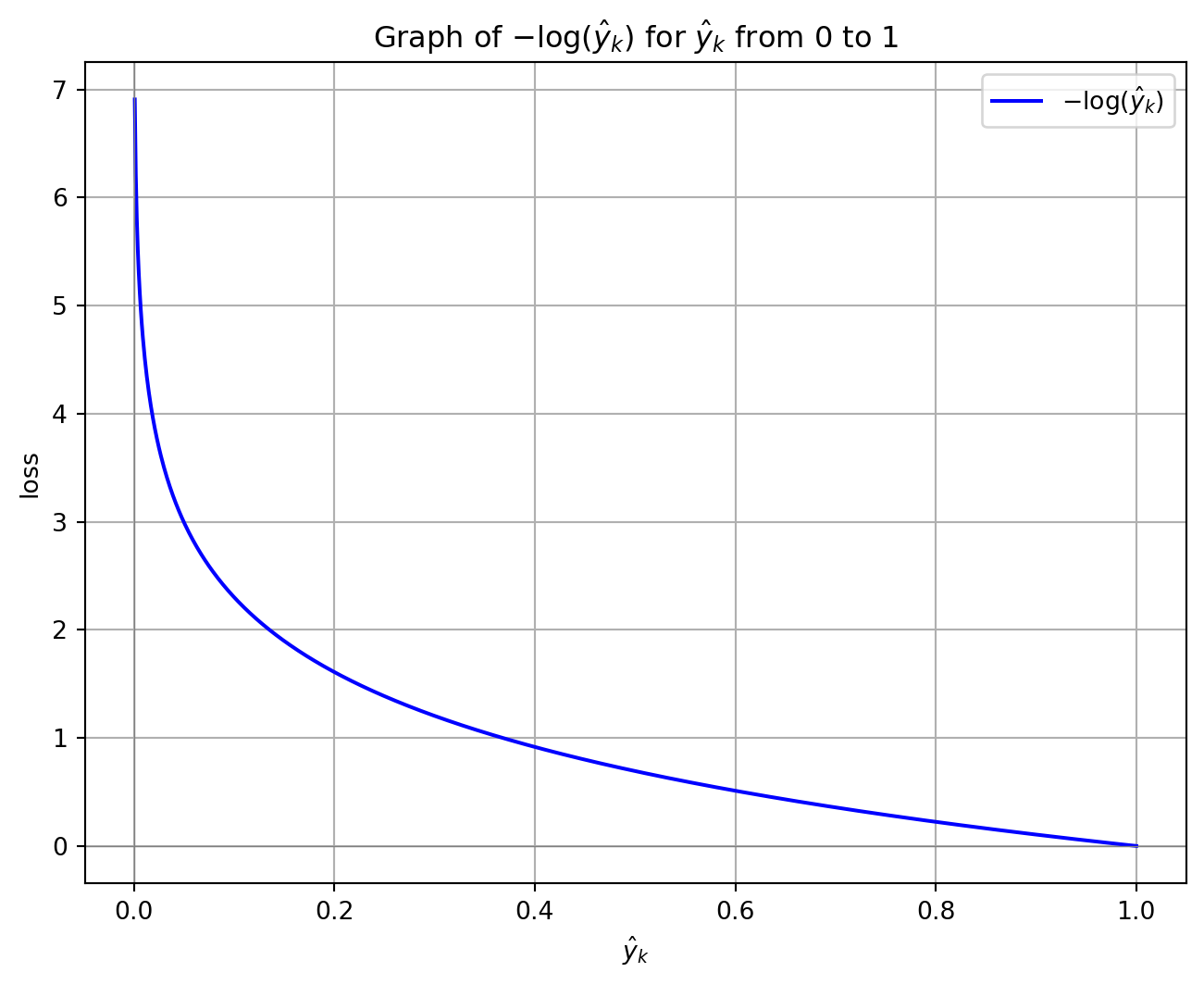
Cross-entropy loss function
The cross-entropy in a multi-class classification task for one example:
\[ J(W) = -\sum_{k=1}^{K} y_k \log(\hat{y}_k) \]
Where:
- \(K\) is the number of classes.
- \(y_k\) is the true distribution for the class \(k\).
- \(\hat{y}_k\) is the predicted probability of class \(k\) from the model.
Cross-entropy loss function
- Classification Problem: 3 classes
- Versicolour, Setosa, Virginica.
- One-Hot Encoding:
- Setosa = \([0, 1, 0]\).
- Softmax Outputs & Loss:
- \([0.22,\mathbf{0.7}, 0.08]\): Loss = \(-\log(0.7) = 0.3567\).
- \([0.7, \mathbf{0.22}, 0.08]\): Loss = \(-\log(0.22) = 1.5141\).
- \([0.7, \mathbf{0.08}, 0.22]\): Loss = \(-\log(0.08) = 2.5257\).
Case: one example
Case: dataset
For a dataset with \(N\) examples, the average cross-entropy loss over all examples is computed as:
\[ L = -\frac{1}{N} \sum_{i=1}^{N} \sum_{k=1}^{K} y_{i,k} \log(\hat{y}_{i,k}) \]
Where:
- \(i\) indexes over the different examples in the dataset.
- \(y_{i,k}\) and \(\hat{y}_{i,k}\) are the true and predicted probabilities for class \(k\) of example \(i\), respectively.
Regularization
Definition
Regularization comprises a set of techniques designed to enhance a model’s ability to generalize by mitigating overfitting. By discouraging excessive model complexity, these methods improve the model’s robustness and performance on unseen data.
Adding penalty terms to the loss
In numerical optimization, it is standard practice to incorporate additional terms into the objective function to deter undesirable model characteristics.
For a minimization problem, the optimization process aims to circumvent the substantial costs associated with these penalty terms.
Loss function
Consider the mean absolute error loss function:
\[ \mathrm{MAE}(X,W) = \frac{1}{N} \sum_{i=1}^N | h_W(x_i) - y_i | \]
Where:
- \(W\) are the weights of our network.
- \(h_W(x_i)\) is the output of the network for example \(i\).
- \(y_i\) is the true label for example \(i\).
Penalty term(s)
One or more terms can be added to the loss:
\[ \mathrm{MAE}(X,W) = \frac{1}{N} \sum_{i=1}^N | h_W(x_i) - y_i | + \mathrm{penalty} \]
Norm
A norm is assigns a non-negative length to a vector.
The \(\ell_p\) norm of a vector \(\mathbf{z} = [z_1, z_2, \ldots, z_n]\) is defined as:
\[ \|\mathbf{z}\|_p = \left( \sum_{i=1}^{n} |z_i|^p \right)^{1/p} \]
\(\ell_1\) and \(\ell_2\) norms
The \(\ell_1\) norm (Manhattan norm) is:
\[ \|\mathbf{z}\|_1 = \sum_{i=1}^{n} |z_i| \]
The \(\ell_2\) norm (Euclidean norm) is:
\[ \|\mathbf{z}\|_2 = \sqrt{\sum_{i=1}^{n} z_i^2} \]
\(\ell_1\) and \(\ell_2\) regularization
Below, \(\alpha\) and \(\beta\) determine the degree of regularization applied; setting these values to zero effectively disables the regularization term. \[ \mathrm{MAE}(X,W) = \frac{1}{N} \sum_{i=1}^N | h_W(x_i) - y_i | + \alpha \ell_1 + \beta \ell_2 \]
Guidelines
- \(\ell_1\) Regularization:
- Promotes sparsity, setting many weights to zero.
- Useful for feature selection by reducing feature reliance.
- \(\ell_2\) Regularization:
- Promotes small, distributed weights for stability.
- Ideal when all features contribute and reducing complexity is key.
Keras example
Dropout
Dropout is a regularization technique in neural networks where randomly selected neurons are ignored during training, reducing overfitting by preventing co-adaptation of features.
Dropout
During each training step, each neuron in a dropout layer has a probability \(p\) of being excluded from the computation, typical values for \(p\) are between 10% and 50%.
While seemingly counterintuitive, this approach prevents the network from depending on specific neurons, promoting the distribution of learned representations across multiple neurons.
Dropout
Dropout is one of the most popular and effective methods for reducing overfitting.
The typical improvement in performance is modest, usually around 1 to 2%.
Keras
import keras
from keras.models import Sequential
from keras.layers import InputLayer, Dropout, Flatten, Dense
model = tf.keras.Sequential([
InputLayer(shape=[28, 28]),
Flatten(),
Dropout(rate=0.2),
Dense(300, activation="relu"),
Dropout(rate=0.2),
Dense(100, activation="relu"),
Dropout(rate=0.2),
Dense(10, activation="softmax")
])Definition
Early stopping is a regularization technique that halts training once the model’s performance on a validation set begins to degrade, preventing overfitting by stopping before the model learns noise.
Early Stopping
Prologue
Summary
- Loss Functions:
- Regression Tasks: Mean Squared Error (MSE).
- Classification Tasks: Cross-Entropy Loss with Softmax activation for multi-class outputs.
- Regularization Techniques:
- L1 and L2 Regularization: Add penalty terms to the loss to discourage large weights.
- Dropout: Randomly deactivate neurons during training to prevent overfitting.
- Early Stopping: Halt training when validation performance deteriorates.
Next lecture
- We will introduce convolutional neural networks.
References
Géron, Aurélien. 2022. Hands-on Machine Learning with Scikit-Learn, Keras, and TensorFlow. 3rd ed. O’Reilly Media, Inc.
Hinton, Geoffrey E., Nitish Srivastava, Alex Krizhevsky, Ilya Sutskever, and Ruslan Salakhutdinov. 2012. “Improving Neural Networks by Preventing Co-Adaptation of Feature Detectors.” CoRR abs/1207.0580. http://arxiv.org/abs/1207.0580.
Russell, Stuart, and Peter Norvig. 2020. Artificial Intelligence: A Modern Approach. 4th ed. Pearson. http://aima.cs.berkeley.edu/.
Marcel Turcotte
School of Electrical Engineering and Computer Science (EECS)
University of Ottawa